
2025. 3. 11. 08:00ㆍEng'g
자율주행 기술 개발 방식에는 여러 가지 접근법이 존재하며, 그중 대표적인 두 가지 방식이
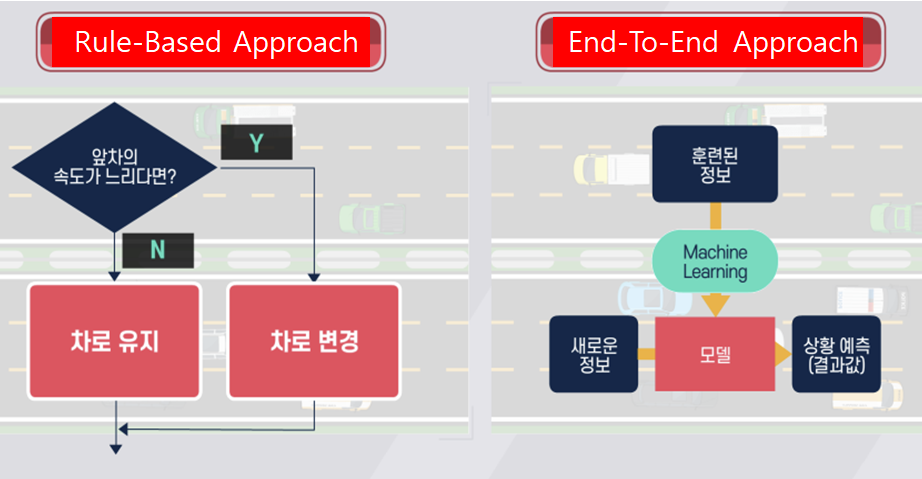
Rule-Based(규칙 기반) 방식과 End-to-End(종단 간 학습) 방식입니다.
이 두 접근법은 자율주행 차량이 주행 환경을 이해하고 의사 결정을 내리는 데 사용하는 방법론에서 큰 차이를 보입니다. 아래에서 각각의 방식을 자세히 설명하겠습니다.
Rule-Based(규칙 기반)방식
1. [개념]
Rule-Based 방식은 사람이 미리 정의한 규칙과 알고리즘에 따라 차량이 주행 환경을 분석하고 의사 결정을 내리는 방식입니다. 이 방법은 프로그래머가 도로 상황, 교통 법규, 차량 동작 등을 세세히 규정하여 시스템에 입력하는 방식으로 작동합니다.
2. [특징]
- [모듈화된 구조] : Rule-Based 방식은 일반적으로 여러 모듈로 나뉩니다. 예를 들어:
- [센서 처리] : 카메라, 라이다, 레이더 등의 데이터를 수집 및 처리.
- [지도 및 경로 계획] : 고정밀 지도와 GPS 데이터를 활용해 최적의 경로를 계산.
- [제어 및 행동 계획] : 차량의 속도와 방향을 조정.
- [명시적 규칙] : 도로 표지판 해석, 차선 유지, 장애물 회피 등 각 상황에 대해 명확한 규칙을 설정합니다.
- [데이터 의존성 낮음] : 시스템이 학습보다는 규칙에 의존하기 때문에 대량의 데이터를 필요로 하지 않습니다.
3. [장점]
- [예측 가능성] : 시스템의 행동이 명확히 정의된 규칙에 따라 이루어지므로 결과를 예측하기 쉽습니다.
- [안정성] : 특정 상황에서 안정적으로 작동할 가능성이 높습니다.
- [디버깅 용이] : 문제가 발생했을 때 원인을 추적하고 수정하기가 상대적으로 쉽습니다.
4. [단점]
- [복잡한 상황 처리 한계],: 모든 도로 상황과 변수를 사전에 정의하는 것은 불가능하며, 예상치 못한 상황에 취약합니다.
- [확장성 부족] : 새로운 도로 환경이나 교통 규칙이 추가될 때마다 규칙을 업데이트해야 하므로 확장성이 떨어집니다.
- [유연성 부족] : 인간처럼 직관적으로 판단하거나 학습하지 못합니다.
[End-to-End (종단 간 학습) 방식]
1. [개념]
End-to-End 방식은 딥러닝(Deep Learning)을 기반으로 한 접근법으로, 차량에 입력된 센서 데이터(예: 카메라 이미지)를 직접 처리하여 차량 제어 명령(예: 핸들 조작, 가속/감속)을 출력하는 방식을 말합니다. 즉, 중간 단계 없이 입력에서 출력까지 하나의 모델이 모든 과정을 처리합니다.
2. [특징]
- [통합된 구조] : Rule-Based 방식과 달리 센서 데이터 처리부터 제어 명령 생성까지 하나의 신경망 모델에서 이루어집니다.
- [데이터 중심적 접근] : 대량의 주행 데이터를 활용해 모델을 학습시킵니다.
- [학습 기반 의사결정] : 사람이 규칙을 정의하지 않고, 모델이 데이터를 통해 스스로 주행 패턴과 규칙을 학습합니다.
3. [장점]
- [복잡한 상황 처리 가능]ㅠ: 다양한 도로 상황과 환경에서 학습한 경험을 바탕으로 유연하게 대응할 수 있습니다.
- [확장성] : 새로운 데이터를 추가하여 모델을 재학습시키면 새로운 환경에도 적응할 수 있습니다.
- [단순화된 구조] : 센서 처리, 경로 계획, 제어 등의 과정을 통합하여 설계 복잡성을 줄일 수 있습니다.
4. [단점]
- [불투명성(Black Box 문제)] : 모델 내부 동작이 직관적으로 이해되기 어렵고 결과를 해석하기 힘듭니다.
- [대량의 데이터 필요] : 신뢰할 수 있는 성능을 얻기 위해서는 방대한 양의 고품질 데이터가 필요합니다.
- [안정성 문제] : 예상치 못한 상황에서 비정상적인 결과를 출력할 가능성이 있습니다.
- [디버깅 어려움] : 오류가 발생했을 때 원인을 파악하고 수정하기가 어렵습니다.
[결론]
- Rule-Based 방식은 안정성과 예측 가능성이 중요한 초기 자율주행 시스템이나 제한된 환경(예: 공장 내부나 고속도로 전용 자율주행)에 적합합니다.
- End-to-End 방식은 복잡하고 다양한 도로 환경에서 인간처럼 유연하게 대응해야 하는 고도화된 자율주행 시스템에 적합합니다.
실제 자율주행 시스템에서는 두 방식을 혼합하여 사용하는 경우도 많습니다. 예를 들어, Rule-Based 방식을 기본으로 하되 특정 영역에서는 End-to-End 학습 모델을 활용하거나, 각 방식의 장점을 조합하여 안정성과 유연성을 동시에 확보하려는 시도가 이루어지고 있습니다.
| 특징 | Rule Based | End To End |
| 설계방식 | 명시적 규칙 기반 학습 | 데이터 기반 학습 |
| 구조 | 모듈화(센서 처리, 경로계획 등 분리 | 통합형(입력에서 출력까지 하나의 모델) |
| 데이터 요구량 | 상대적으로 적음 | 방대한 양의 데이터 |
| 확장성 | 낮음 | 높음 |
| 복잡한 상황처리 | 제한적 | 가능 |
| 디버킹 용이성 | 높음 | 낮음 |
자동차 제조사 개발사례
(1) Tesla
접근 방식: End-to-End 방식에 가까운 딥러닝 기반 접근법.
특징:
Tesla는 카메라 중심의 비전 시스템(Computer Vision)을 활용하여 자율주행 데이터를 수집 및 학습.
자사의 차량에서 실시간으로 데이터를 수집해 Neural Network를 지속적으로 개선.
"Full Self-Driving (FSD)" 소프트웨어는 OTA(Over-the-Air) 업데이트를 통해 꾸준히 발전.
성과:
Autopilot 및 FSD 기능을 통해 부분 자율주행(레벨 2~3)을 상용화.
(2) Mercedes-Benz
접근 방식: Rule-Based와 데이터 기반 접근법의 혼합.
특징:
고급 차량에 고정밀 지도와 다양한 센서를 활용한 레벨 3 자율주행 기술 도입.
독일에서 세계 최초로 레벨 3 인증을 받은 "Drive Pilot" 시스템 제공.
성과:
고속도로 환경에서 제한적인 자율주행 기능 상용화.
(3) Toyota
접근 방식: Rule-Based 중심이지만 AI 연구소(Toyota Research Institute)를 통한 End-to-End 연구도 진행.
특징:
안전성을 최우선으로 하며, 인간과 협력하는 "Guardian" 시스템 개발.
딥러닝과 시뮬레이션을 활용한 데이터 학습 진행.
IT 및 기술 중심 기업 개발사례
(1) Waymo (구글/알파벳 계열사)
접근 방식: Rule-Based와 AI 기반 접근법의 혼합.
특징:
라이다(LiDAR), 레이더, 카메라 등 다양한 센서를 결합한 고정밀 Rule-Based 시스템 활용.
딥러닝을 통해 복잡한 주행 상황에서도 적응 가능한 AI 모델 개발.
성과:
세계 최초로 완전 자율주행 택시 서비스(Waymo One)를 미국 피닉스에서 상용화.
(2) NVIDIA
접근 방식: End-to-End 딥러닝 기반 접근법.
특징:
GPU 기술과 딥러닝 플랫폼인 NVIDIA Drive를 통해 자율주행 차량용 AI 칩셋 및 소프트웨어 제공.
시뮬레이션 환경에서 대규모 학습과 테스트 가능.
성과:
다양한 자동차 제조사와 협력하여 자율주행 솔루션 제공.
스타트업 기업 개발사례
(1) Aurora Innovation
접근 방식: Rule-Based와 AI 혼합.
특징:
전통적인 자동차 제조사 및 물류 회사들과 협력하여 상용화 목표.
라이다와 딥러닝 기반의 안전한 주행 시스템 개발.
(2) Cruise (GM 계열사)
접근 방식: Rule-Based 중심에 AI 보완적 활용.
특징:
General Motors(GM)가 인수하여 자율주행 택시 서비스 개발에 주력.
샌프란시스코에서 완전 자율주행 차량 테스트 중.
(3) Zoox (아마존 계열사)
접근 방식: End-to-End와 Rule-Based 혼합.
특징:
완전 자율주행 전기차를 설계부터 제작까지 담당. 승객 중심 설계로 로보택시 서비스에 초점
중국 기업 개발사례
(1) Baidu
접근 방식: Rule-Based와 End-to-End 혼합.
특징:
"Apollo Project"를 통해 오픈소스 자율주행 플랫폼 제공. 중국 내 로보택시 서비스 테스트 중.
(2) Pony.ai
접근 방식: Rule-Based 중심이지만 AI 통합 연구 진행 중.
특징:
미국과 중국 양국에서 자율주행 테스트 진행. Toyota와 협력하여 상용화를 추진.
'Eng'g' 카테고리의 다른 글
| 자동차 세그먼트 설명 (0) | 2025.04.27 |
|---|---|
| 티스토리 구글 애드센스 등록 방법 (0) | 2025.03.24 |
| 드림렌즈 (0) | 2025.02.13 |
| 핵융합 기술 개발의 도전 과제 (1) | 2025.01.16 |
| 인공태양, 핵융합 토카막(Tokamak) (1) | 2025.01.15 |